文:潘德军
广西机电职业技术学院
摘 要:阐述了自动压铸生产工艺,分析了其局限性,提出了基于工业机器人的智能压铸生产系统。 以工业机器人来取代常规的取件、喷吹机械手,并新增了剪口模用液压机,工业机器人采用联机作业方式,完成了全自动的压铸生产。
关键词:压铸机;工业机器人;生产系统
常规的压铸机配有注料与取件机械手;并结合控制系统,实现自动压铸生产。 其自动压铸工艺为:①合模;②料槽注料;③压射;④凝固;⑤开模;⑥取件;⑦模具喷淋冷却;⑧模具吹干;⑨合模。 工序⑥~⑧分别由取件、喷吹机械手完成。
取件机械手进行取件时,以光电传感器来判断机械手是否已退出; 然而未能对压铸模脱模完整性,以及合模时刻的模具状态进行准确的判断。 喷吹机械手上安装有多排喷管, 这些喷管的行径路线、移动速度以及作业时间均统一控制;同时仅可在竖直方向上移动;工作状态下,喷吹方向固定;喷管流量只能停机调整。 对常规的自动压铸工艺进行分析,总结了其局限性:①对模具中凸、凹部位的冷却程度难以控制; ②模具凸模根部与凹模底部,难以吹干;易因积水而使产品形成缺陷;③难以建立模具长、宽、高 3 方向的温度梯度,其铸件质量受到限制;④连续作业时间短,难以实现大批量的稳定生产。
1 工业机器人智能压铸生产系统
针对前述取件与喷吹机械手的不足之处,本课题以工业机器人取代常规的取件与喷吹机械手;新增了剪口模用液压机。 在取件、喷吹工序完成之后,利用光电检测装置对压铸模脱模完整性进行检测;利用剪口模用液压机驱动剪口模, 使浇注系统与压铸件分离,完成全自动的压铸生产。
1.1 机器人取件与模具喷吹
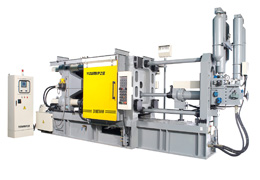
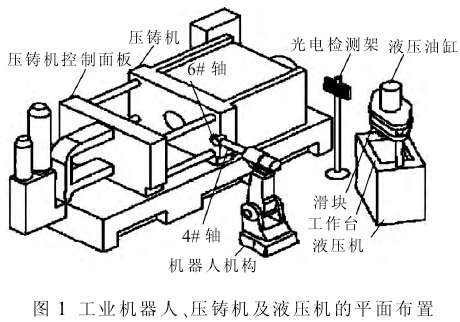
图 1 为 ABB IRB2400F 型工业机器人、 东洋公司 BD-350V3 型压铸机以及自主研发的液压机三者之间的平面布置示意图。压铸机配置有浇注机械手,位于图 1 中压铸机的人工操作一侧; 工业机械人由6 轴机构+控制系统构成。电磁阀安装在工业机器人的 4# 轴上,用于脱模剂与压缩空气的通断控制。 脱模剂与压缩空气以各自的管道进行输送,其管道经各轴到达 6# 轴;与 6#轴上动模、定模喷管相连。 工业机械手 6# 轴上安装有三爪卡盘,由压缩空气驱动;通过电磁阀控制压缩空气的通断来实现三爪卡盘的夹紧与松开控制。
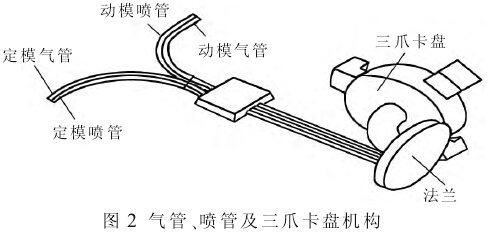
气管、喷管及三爪卡盘机构如图 2。 动模、定模喷管均配置有气管与水管。 进行喷淋、吹干操作时,无需翻转三爪卡盘。该机构与工业机器人的 6# 轴以法兰连接。料柄夹持位与夹持准备位之间的连线,与开模方向重合;三爪卡盘沿着开模方向运动。
工业机器人进入到料柄夹持状态之后,由“刚性姿态”进入到“柔性姿态”,等待压铸机顶出;待顶出完成之后,工业机器人重新回到“刚性姿态”;夹持压铸模具,并对其实施定点的、移动式的喷淋与吹干操作。 模具清理完成之后,对其进行脱模检测。
1.2 脱模检测
工业机器人将压铸模具送至光电检测装置前,对其脱模完整性进行检测。 光电检测装置发射出感应光,当遇到物体(如渣包),对感应光进行反射;光电检测装置接收到反射光, 将发送出该渣包脱模的信号。 光电检测装置上,安装有 10 多个位置可调的光电传感器,用于模具各部位的脱模检测。
1.3 浇注系统与压铸件的分离
待脱模完整之后, 工业机器人将压铸模具送至剪口模位置,松开三爪卡盘;将模具放置在剪口模下模上。 液压机接收到剪切指令,通过滑块,驱动剪口模的上模由上至下运动,完成剪切操作;从而实现浇注系统与压铸件的分离。
2 设备控制及控制 I/O
2.1 设备控制
以工业机器人取代取件与喷吹机械手之后;工业机器人成为主控对象,压铸机则成了被控对象。拆除取件与喷吹机械手之后,安装工业机器人,并与压铸机连接。 由于压铸机与工业机器人之间未配置专门的通信接口,因而,沿用压铸机与取件、喷吹机械手之间的控制信号与方式。液压机开到位、关到位控制由行程开关进行判断。 压铸机、液压机、工业机器人采用独立的电源; 设备之间信号联络通过继电器实现。 压铸机、液压机、工业机器人各设备可独立运行,也可联机作业。3设备的紧急急停操作键采用串接方式;在联动作业时,任意 1 台设备急停,其他2 台设备也会立即停止,确保生产安全。
2.2 控制 I/O
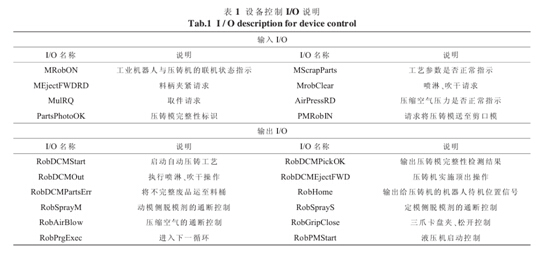
工业机器人作为主动控制中心, 配置有 DigtalI/O 24VDC 的 数 字接口 ; 设备控制共有 20 点 信 号(数字输入 8 点,数字输出 12 点),见表 1。 实现工业机器人与压铸机, 工业机器人与液压机之间的信息联络;而液压机与压铸机之间无信息联络。
3 程序设计
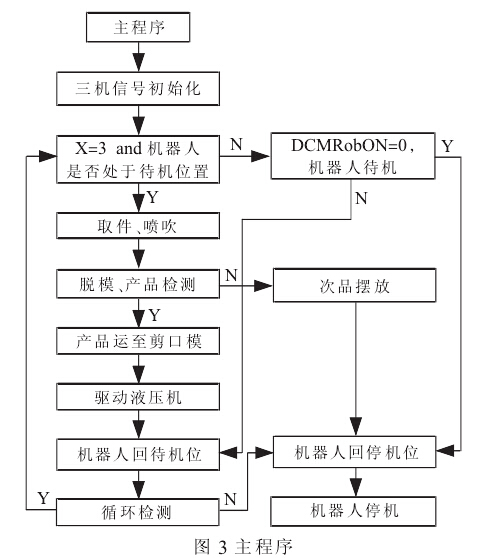
生产程序由主程序与子程序两部分构成, 其子程序包括:①初始化及工具、载荷定义;②压缩空气压力检测;③正品检测、废品摆放;④取件、喷淋、吹干;⑤工业机器人回位、停机;⑥工艺启动。主程序完成子程序的调用以及压铸生产的循环控制。 主程序流程如图 3 所示。
4 应用效果
较常规的压铸生产系统, 该基于工业机器人的智能压铸生产系统优势明显: ①解决了常规压铸生产时喷淋冷却控制难、 吹干不彻底问题; 实现了定点的、移动式的喷吹;②渣料及时回炉,降低了在线生产成本;③实现了长时间的、连续的稳定生产;压铸件品质满足客户需求,并延长了模具的使用寿命。
















 25.72万
25.72万